In order to use LINK with the NexLINK hardware, please download the .LCS file in the link below and add it to your CAN Stream in PCLink G5.
Review ALL SCREENSHOTS for Configuration settings.
In a nutshell the instructions are:
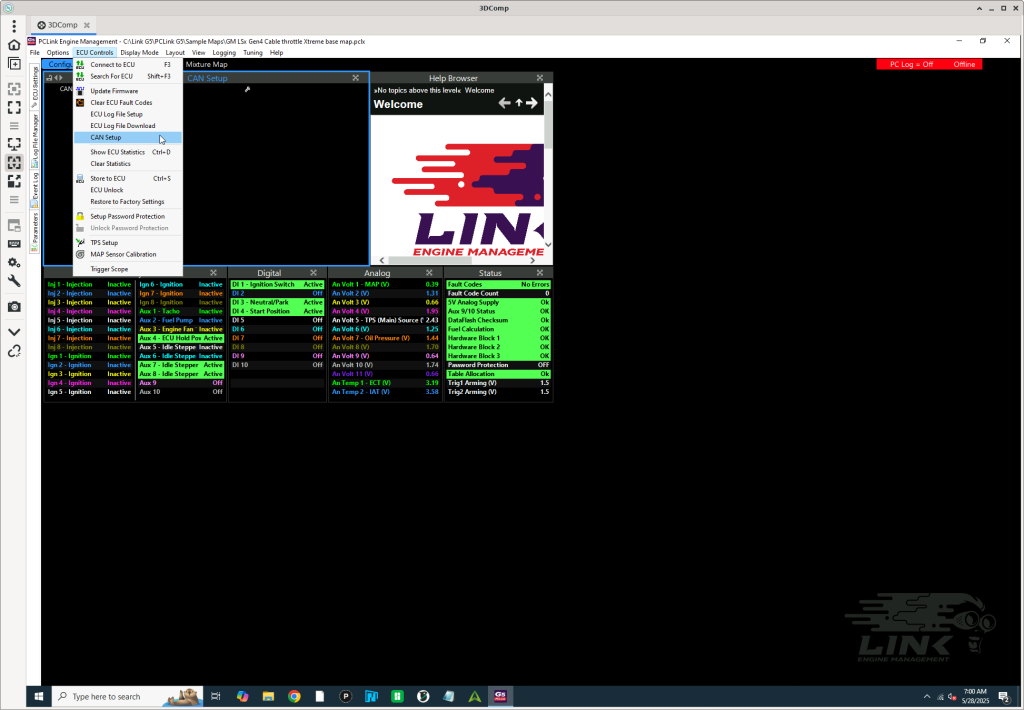
- Open the CAN Setup window (PCLink > ECU Controls > CAN Setup).
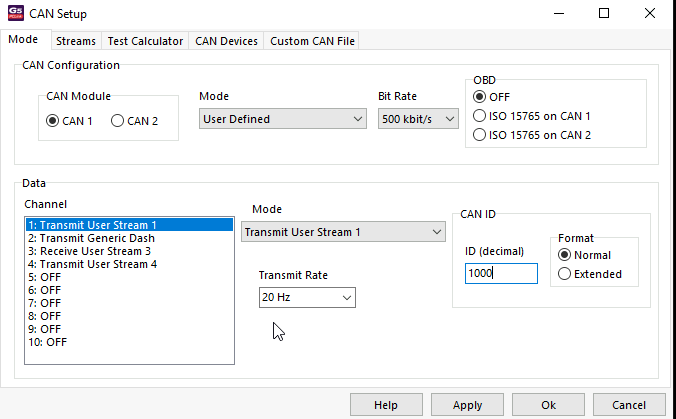
- Select the CAN module to be used.
- Set the Mode to ‘User Defined’.
- Configure the Bit Rate to 500.
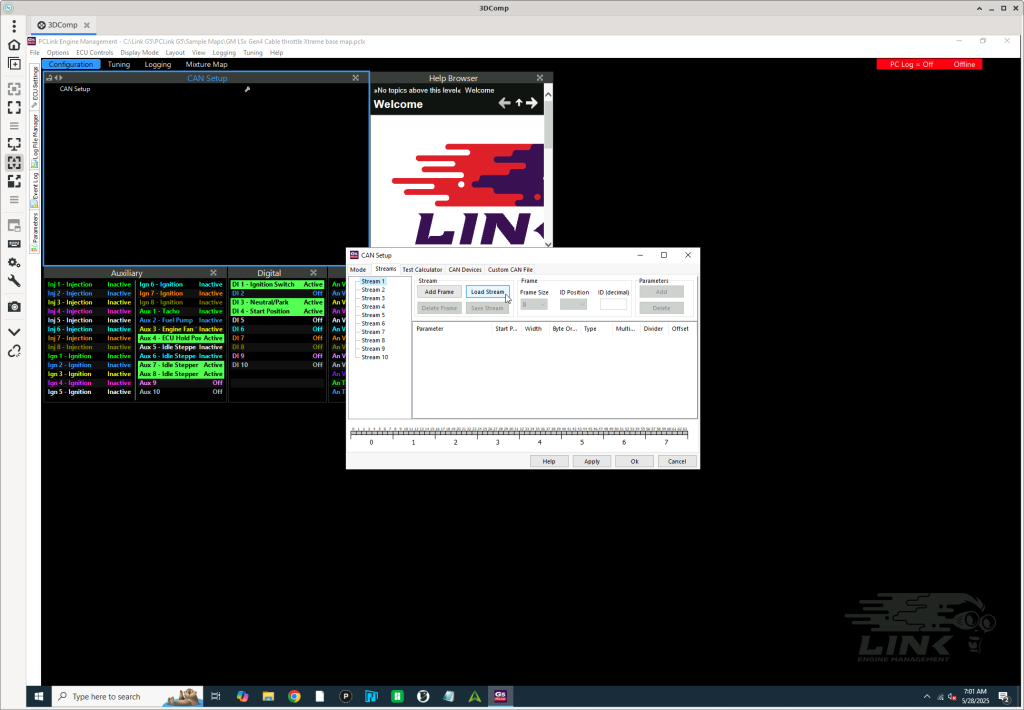
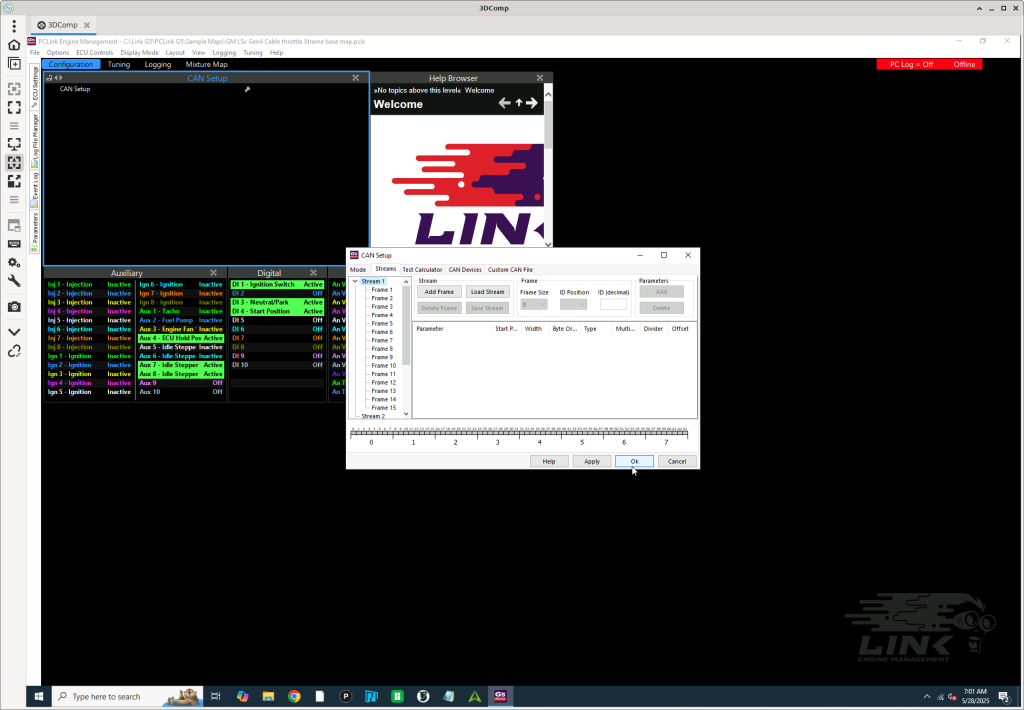
- Select a spare CAN channel.
- Select ‘Transmit User Stream 1’ (or User Stream 2 depending on where you put it) from the Mode drop-down menu.
- Set the CAN ID to match what the dash expects. (1000)
- Set the Transmit Rate to 20Hz.
- Make sure no other CAN channels are configured on the same CAN ID as the NexGenEFI CAN channel.
- Click Apply and then OK.
- Make sure a Store (F4) is performed.
05/18/2026 Release: NexGenEFI CAN Stream v1.3.lcs
This only shows how to load the LCS file. Please read your LINK ECU documentation to ensure you are loading it into the correct CAN Module and your CAN speed is set correctly.
Here are the data points that will be sent from the LINK ECU to the Pro Edition Digital Dash. More can be added, just get with us to make the updates to the LCS file. More than likely if some of these data points are not needed this file will be updated and they will be removed/replaced with other data points requested by End Users.
Engine Speed (RPM)
MAP
MGP
BAP
TPS
Injector Duty Cycle
Injector Duty Cycle (Sec)
Injection Actual PW
ECT (Coolant temp)
IAT
Batt Voltage
Mass Air Flow
Gear
Injection Timing
Ignition Angle
Inlet Bank 1 Position
Inlet Bank 2 Position
Exhaust Bank 1 Position
Exhaust Bank 2 Position
Lambda 1
Lambda 2
Trig 1 Err Counter
Fault Codes
Fuel Pressure
Oil Temp
Oil Pressure
LF Wheel Speed
LR Wheel Speed
RF Wheel Speed
RR Wheel Speed
Knock Table 1 Level
Knock Table 2 Level
Knock Table 3 Level
Knock Table 4 Level
Knock Table 5 Level
Knock Table 6 Level
Knock Table 7 Level
Knock Table 8 Level
Limit Flags Word
APS
E85 %
Anti Lag Status
Launch Control Status
Traction Status
Cruise Control Status
GP Speed 1
GP Pressure 1 thru 4
On the LAST STEP, make sure you click APPLY and then OK.